
SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,所谓完全的地图(a consistent map)是指不受障碍行进到房间可进入的每个角落。SLAM最早由Smith、Self和Cheeseman于1988年提出。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
近些年来,随着SLAM技术的不断深入发展,SLAM相关产品已经应用到诸如自动驾驶、、扫地机器人、三维数据采集设备等领域。在测绘地理信息领域,SLAM三维扫描仪这几年方兴未艾,以飞马机器人为代表的的SLAM100、SLAM2000等系列的手持式三维激光扫描仪,将空间数据采集工具进一步拓展,结合相关后处理软件,形成了新的基于SLAM技术的空间三维数据获取和建模解决方案。本文就基于SLAM扫描仪的数据进行了三维数据的采集和处理。
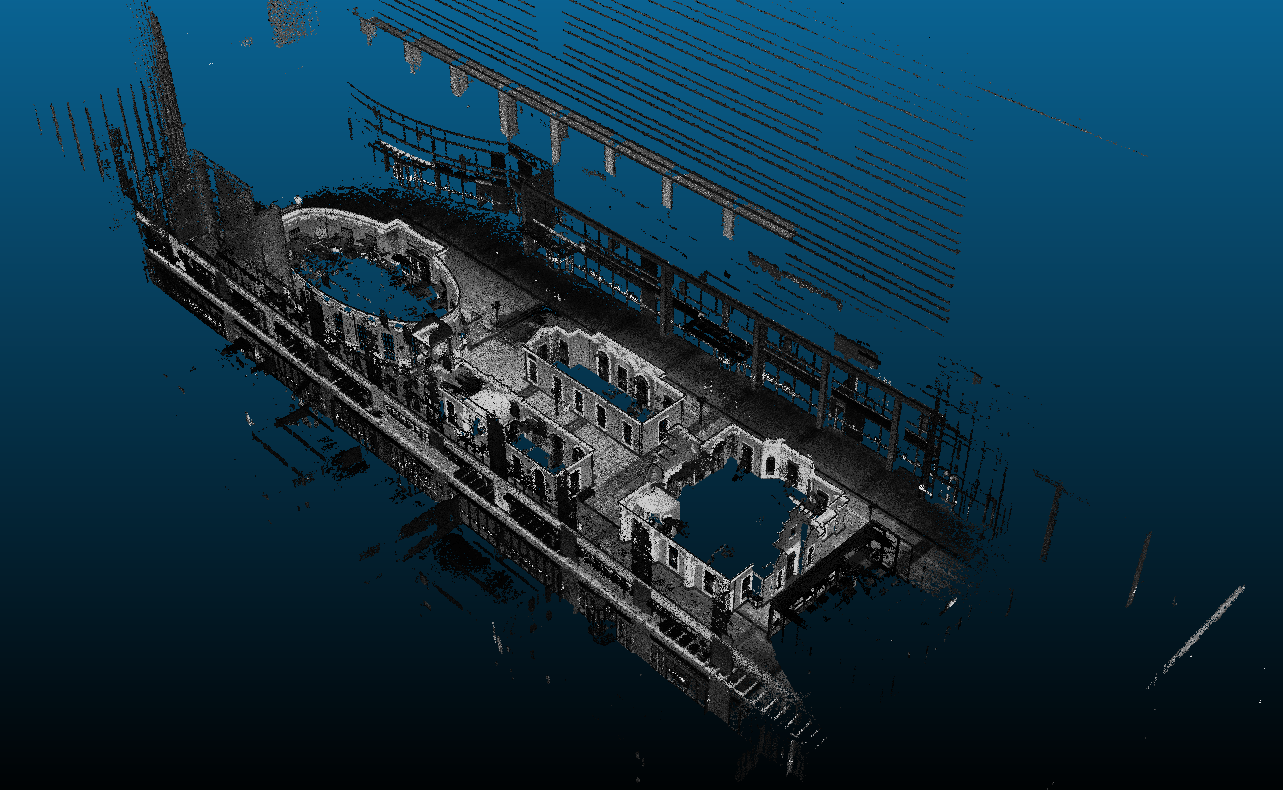
1.数据采集及预处理
通过手持式SLAM扫描仪,结合其移动性,可快速便捷的进行空间数据的三维采集,点云精度达到1-3厘米。
数据采集之后,结合后处理软件,可以得到完整的空间三维真彩色点云数据。
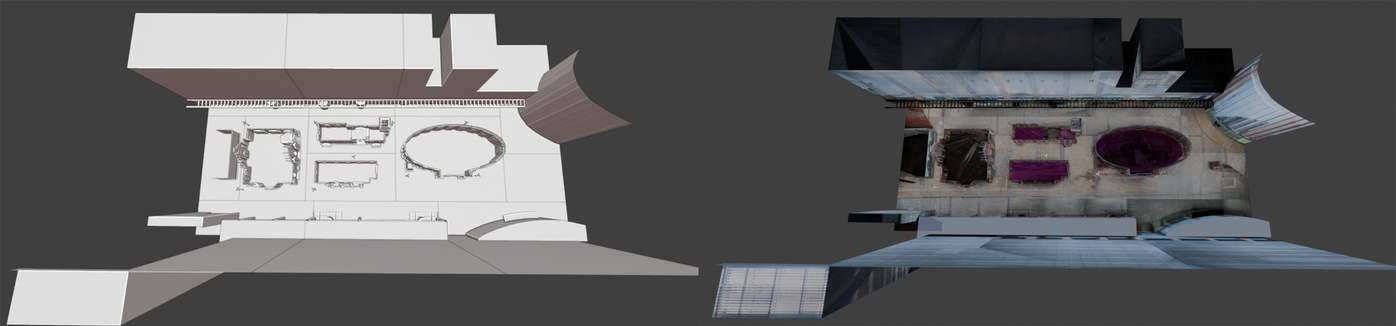
2.数据建模
将三维重建后的真彩色三维点云输出成通用的文本格式或e57等格式,再导入到相应的三维建模软件之中,或是我们安博泰克自己开发的三维软件之中,可以进行基于点云数据的三维重建。
三维重建后的点云数据完整。



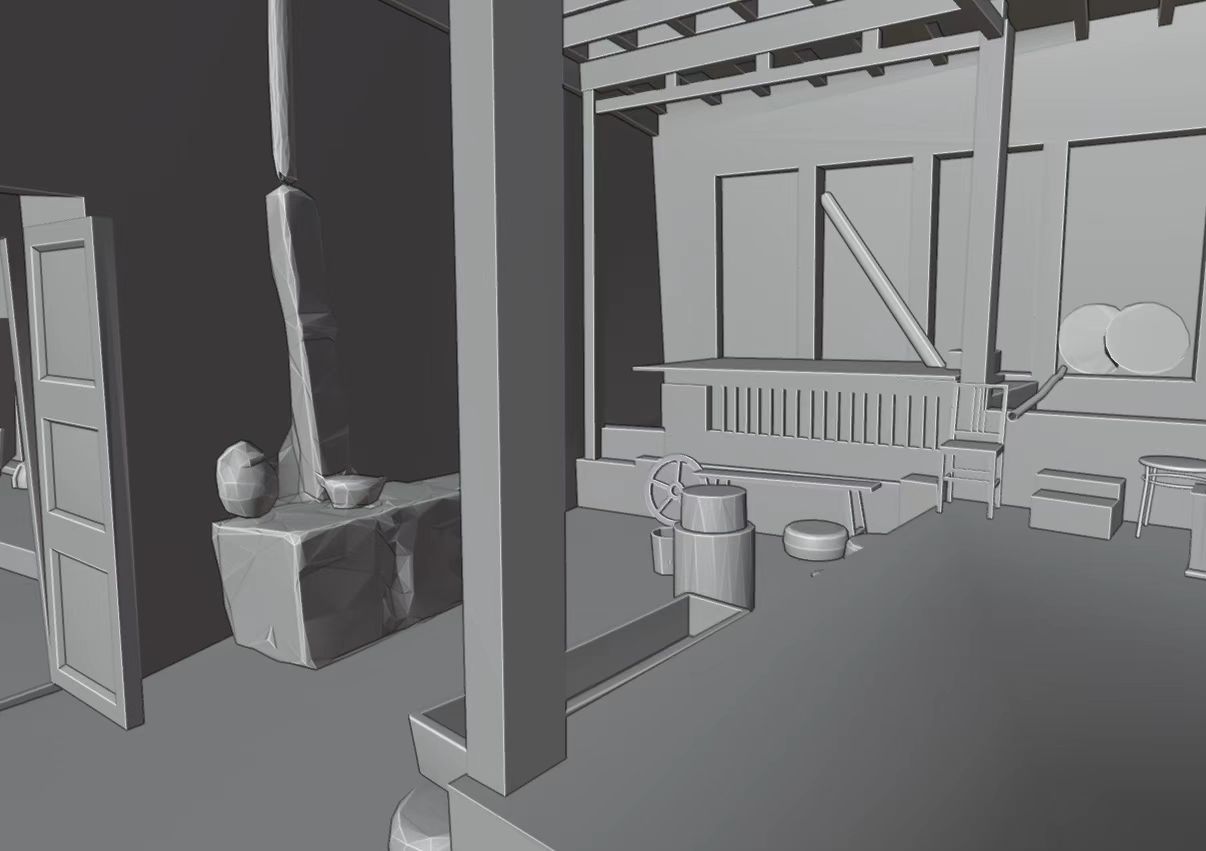
3.三维整理和贴图
通过点云数据,可以进行三维重建。基于原始点云重建的三维模型一般是mesh格网,需要在特定的软件中进行三维模型的整理,让三维模型更加平滑。
对于纹理贴图,除了传统的基于3D Max的手工贴图之外,我们也自己开发了三维快速自动贴图的程序,无需手动贴题,直接利用SLAM扫描仪自带的相机拍摄的纹理,可以让机器自动完成贴图,达到良好的三维贴图效果。
这种自动贴图的方式,大大减少了人工,提高了效率。